Constant Force Linkage
Scroll down
Constant Force Linkage
Scroll down
For MENG 778 — Advanced Robotic Mechanisms — September 2019
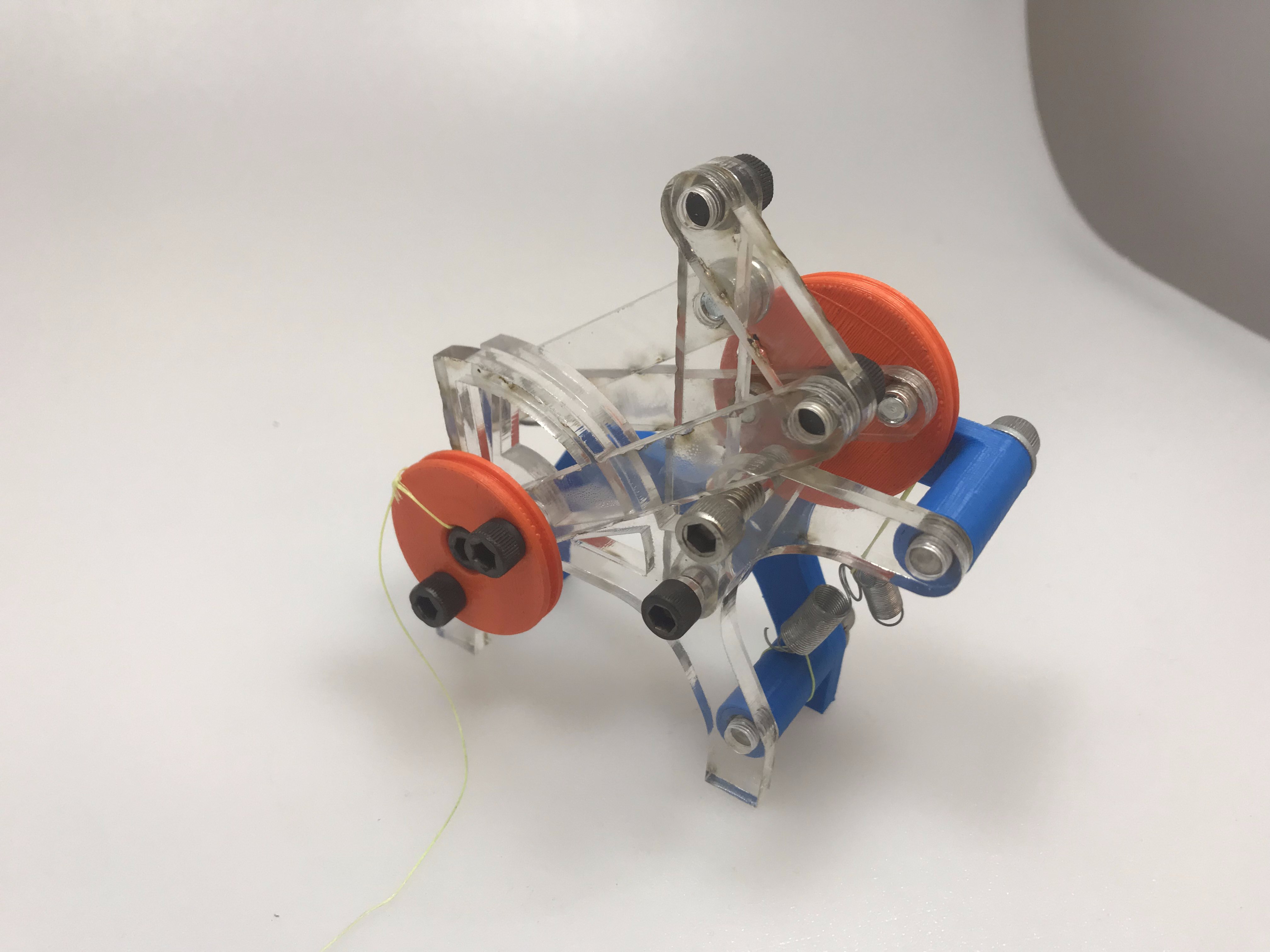
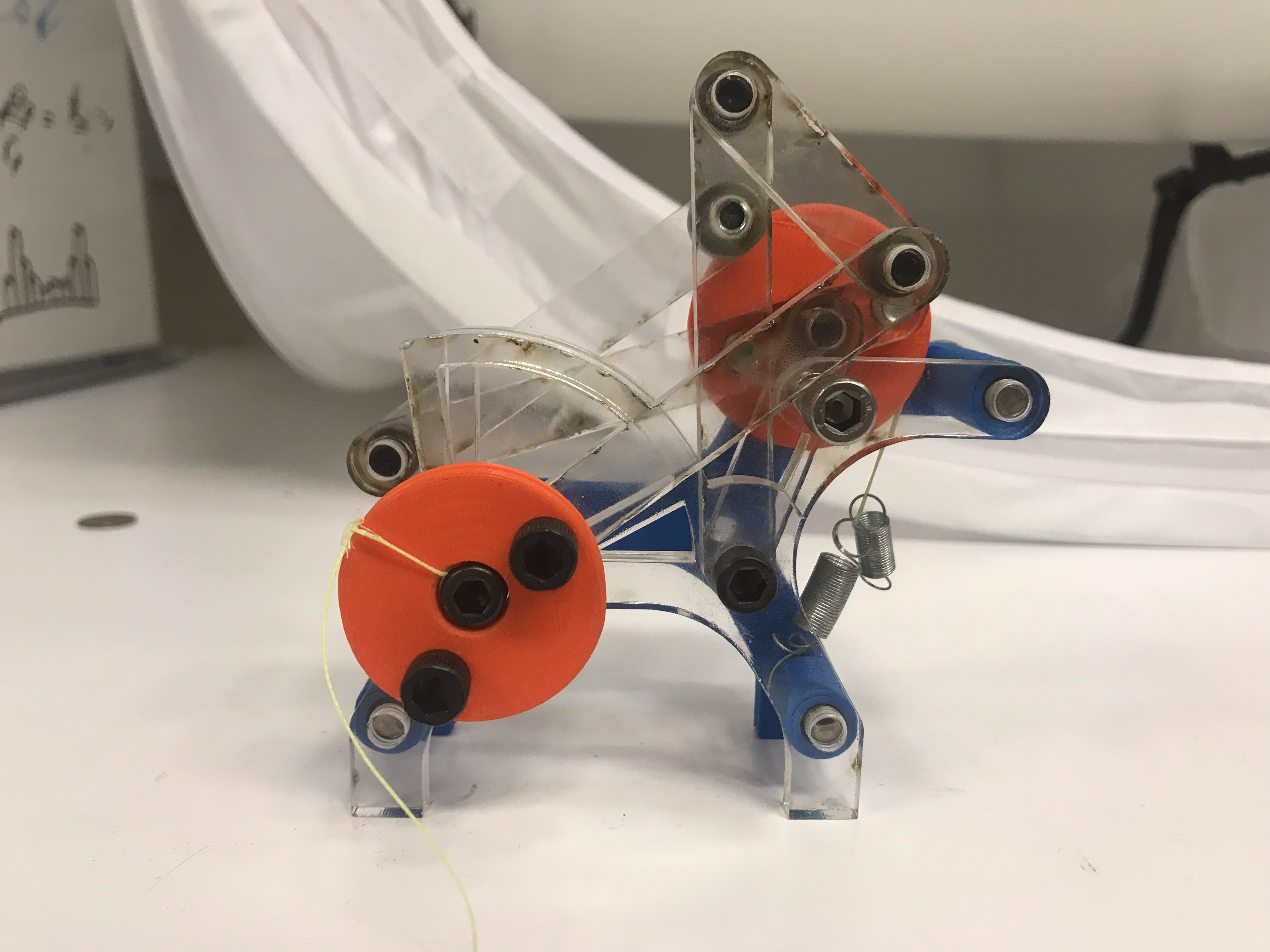
This mechanism was designed and built solely by me following the methodology described by Gregory Starr of the University of New Mexico. In this paper, Starr presents a way to find link lengths for a four bar linkage such that the angles of the rocker and crank obey a specific functional relationship. By defining three points (characteristic of the specified function) along the rocker's path, Starr shows that it is possible to generate a simple system of equations that will uniquely constrain the link lengths. Since I wanted to create a constant force mechanisms, I created a linkage such that the angle of the rocker changed like the square root of the angle of the crank. Then, by connecting the rocker to a Hooke's law spring (which stores energy like position squared), the crank experienced an approximately constant force.
Fabrication process: Most of the parts for this mechanism were 2.5-dimensional, and thus able to be fabricated with a laser cutter. There were two parts—the pulleys attached to the rocker and the crank—that were properly three dimensional and were created by a 3D printer. The mechanism was assembled using 1/4-20 screws. To couple the rocker pulley to the spring and the crank pulley to the output force, I used 50 lb. fishing line.
MEDIA